OORB Studio, The Replit For Robotics
Agentic ROS 2 robotics dev in the browser
73 followers
Agentic ROS 2 robotics dev in the browser
73 followers
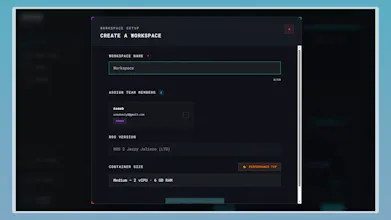
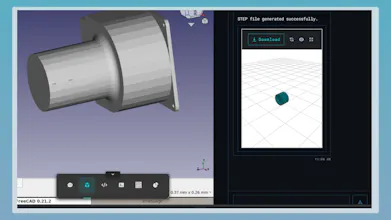
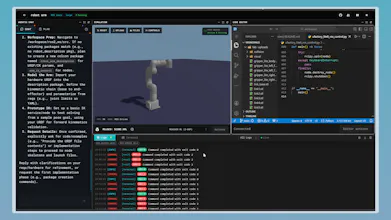
OORB Studio is an agentic, browser-based workspace for ROS 2 robotics. Describe the robot in plain English → get a plan → apply changes to the repo → run MuJoCo simulation → push to GitHub and collaborate with your team. Built for the messy reality of robotics dev: reproducible environments, fast iteration, and a tight feedback loop with builders