
Aero Hand Open
An open-source dexterous hand for research and makers
101 followers
An open-source dexterous hand for research and makers
101 followers
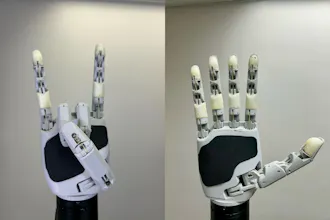
Aero Hand Open is a lightweight, open-source tendon-driven robotic hand. Fully 3D-printable and modular, it offers smooth, human-like motion with ESP32 and ROS2 support — an accessible platform for research, education, and prototyping.










Aero Hand Open
@jiuqi_w97 This is amazing — huge congrats on the launch! 🤖 Making a fully 3D-printable, open-source robotic hand this accessible is a massive step forward for the robotics community. Love the focus on simplicity, affordability, and real-world usability. Can’t wait to see what creators and researchers build with Aero Hand Open! 👏
Aero Hand Open
Aero Hand Open features:
Weight: 375 grams
Size: 198mm x 95mm x 53.5mm
Actuation: 7 Coreless Serial Bus Servos, Cable Driven, Backdriveable
DOF: 7 Active DOF, 16 joints (Thumb x3, Fingers x1 underactuated)
Finger Tip Force: ~10 N
Hand Pulling Force: ~10 N
Open + Close Speed: ~1 Hz
Joint Range of Motion:
Finger Joints: 90°
Thumb Abduction: 0°-100°
Thumb CMC Flex: 55°
Thumb Proximal/Distal: 90°
Communication Interface: USB 2.0
MCU: ESP32-S3
Working Voltage: 6V
Maximum Current: 8A
Osaurus
Wow... While eating my sandwich for lunch today, I was literally thinking that I would love to have a pair of robot hands to turn the pages of a book I'm reading (I know, I still do that). And then I see this. ✨
Osaurus
Wow... While eating my sandwich for lunch today, I was literally thinking that I would love to have a pair of robot hands to turn the pages of a book I'm reading (I know, I still do that). And then I see this. ✨
Osaurus
Wow... While eating my sandwich for lunch today, I was literally thinking that I would love to have a pair of robot hands to turn the pages of a book I'm reading (I know, I still do that). And then I see this. ✨
Aero Hand Open is an incredible project—making a fully open-source, 3D-printable robotic hand accessible to researchers and makers is a huge step forward. Do you plan to share datasets or simulation tools to support further experimentation?
UI Bakery
Open-sourcing a dexterous robotic hand is incredible - huge value for researchers and makers. Love the accessibility and openness of this project. Congrats!