
Open Source Rover
A DIY rover based on the rovers on Mars 🔴
2 followers
A DIY rover based on the rovers on Mars 🔴
2 followers
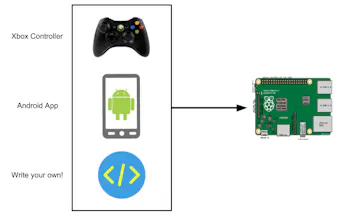
The JPL Open Source Rover is an open source, build it yourself, scaled down version of the 6 wheel rover design that JPL uses to explore the surface of Mars. This project is intended to be a teaching and learning experience for those who want to get involved in mechanical engineering, software, electronics, or robotics.



Calories.fyi